踏 切 模 型 の 自 作 (3)
おっさんHobby
鉄 道 模 型
遮断機用モータ制御(2)
|
(写真説明) 検証中の自動踏切
|
注文していた部品が届いたので早速、遮断機を上下させる部分を試作してみた。 |
|
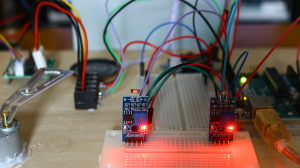
光センサーの検証が終わったのでステッピングモータろ小型マイコン「Aduinio」を接続して動作を検証してみた。 踏切開閉の検証動画
(写真説明) ステッピングモータの動作検証
とりあえず考えていたように動いたがステッピングモータはサーボモータと異なり現在の位置を認識することが出来ないので、電源切断時の状況により最初の立ち上げ時に作動する位置が変わる可能性が有るようだ。 モーターとドライバー等
■ステッピングモータ
(写真説明) 今回の検証装置

踏切のかなり手前で列車が通過した際検知するセンサーを設置しておく。
(写真説明) 列車最後尾の踏切通過を感知するセンサー
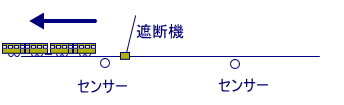
列車の最後尾が踏切を通過したことを検知して踏切を素早く上げてそのまま停止させておく。今回は光センサーを使用しているので一度列車を検知した後、列車を検知しなくなったときに遮断機のモータが動作するようにする。
広告
踏切自作各ページへのリンク
「工作シリーズ」へのリンク
|
  |